|
OpenEV
Extending OpenCV to event-based vision
|
|
OpenEV
Extending OpenCV to event-based vision
|
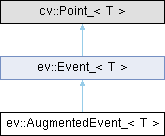
This class extends Event to include: weigth, depth, and stereo. More...
#include <types.hpp>
Public Attributes | |
| WeightType | weight {1} |
| DepthType | depth {0} |
| Stereo | stereo {Stereo::LEFT} |
| Public Attributes inherited from ev::Event_< T > | |
| TimeType | t |
| PolarityType | p |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const AugmentedEvent_< T > &e) |
| Overload of << operator. | |
Additional Inherited Members | |
| Public Member Functions inherited from ev::Event_< T > | |
| Event_ () | |
| Event_ (const Event_< T > &)=default | |
| Event_ (Event_< T > &&) noexcept=default | |
| Event_ (const T x, const T y) | |
| Event_ (const cv::Point_< T > &pt) | |
| Event_ (const T x, const T y, const TimeType t, const PolarityType p) | |
| Event_ (const cv::Point_< T > &pt, const TimeType t, const PolarityType p) | |
| Event_< T > & | operator= (const Event_< T > &)=default |
| template<typename U> | |
| Event_< T > & | operator= (const Event_< U > &e) |
| Event_< T > & | operator= (const cv::Point3_< T > &p) |
| Event_< T > & | operator= (const cv::Point_< T > &p) |
| Event_< T > & | operator= (Event_< T > &&) noexcept=default |
| bool | operator== (const Event_< T > &e) const |
| bool | operator== (const cv::Point_< T > &pt) const |
| bool | operator== (const cv::Point3_< T > &pt) const |
| bool | operator< (const Event_< T > &e) const |
| template<typename U> | |
| operator cv::Point_< U > () const | |
| template<typename U> | |
| operator cv::Point3_< U > () const | |
| double | distance (const Event_< T > &e, const uint8_t type=DISTANCE_NORM_L2|DISTANCE_FLAG_SPATIAL) const |
This class extends Event to include: weigth, depth, and stereo.
Analogously to OpenCV library, the following aliases are defined for convenience:
|
friend |
| DepthType ev::AugmentedEvent_< T >::depth {0} |
Event depth
| Stereo ev::AugmentedEvent_< T >::stereo {Stereo::LEFT} |
Left/right
| WeightType ev::AugmentedEvent_< T >::weight {1} |
Event weight